
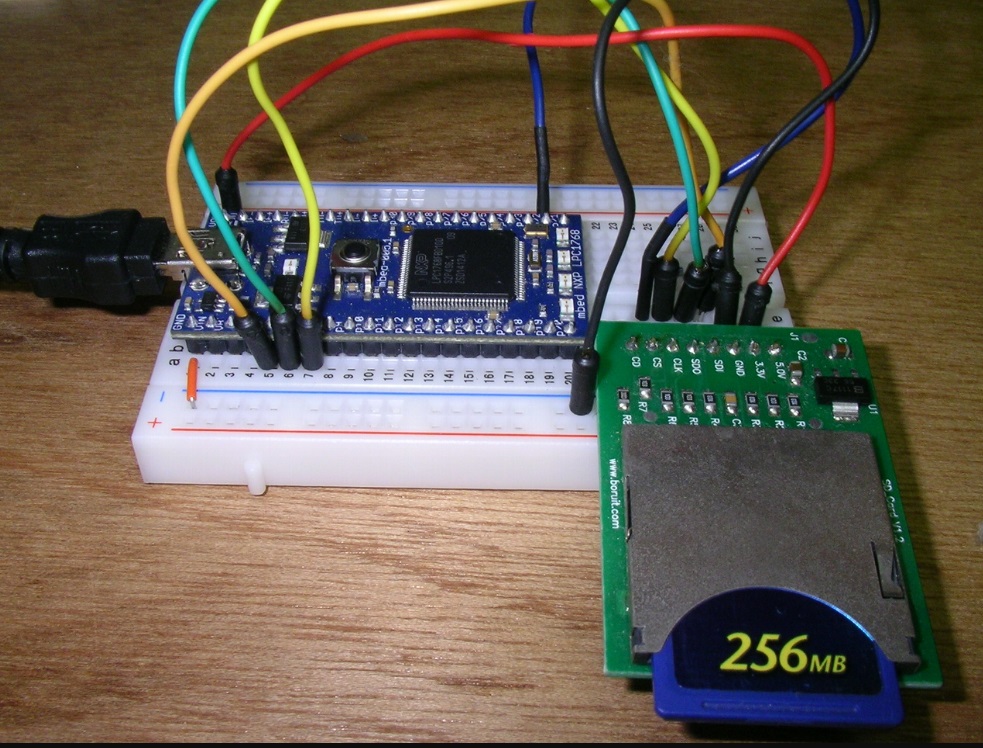
mbedの基本的なI/O方法と実例。
やや古い情報ですが、基本的な構造は変わらないのでご紹介します。
部品も未だ市販してるようです。
興味があるところを読む
基本のI/O
DigitalIn、DigitalOut、PwmOut、Serial、タイマー割込み、ディレーを使う。
mbedなら至って簡単・・・初期化もクロック設定も割込みの設定も不要です。
DigitalIn
- DigitalIn swIN(p30); // p30をパラレル入力として使う。変数名は swIN。
- ピンのハード的なモード設定
swIN.mode(PullUp); // PullUpに設定
swIN.mode(PullNone); // オープンに設定。
swIN.mode(PullDown); // PulDownに設定。これがデフォルト。 - 入力
char x = swIN; とする。
あ~簡単だ~神経が休まるで~
DigitalOut
- DigitalOut swOUT(p30); // p30をパラレル出力に設定。変数名は swOUT だ。
- 出力
swOUT = 1; とか swOUT = 0; とかする。 - ところでC++だから、こんな使い方が出来る。
void ledCtrl(DigitalOut o, BYTE onoff)
{
o = onoff;
}
int main()
{
DigitalOut *x = new DigitalOut(LED1);
ledCtrl(*x, 1); // LED1点灯;
ledCtrl(*x, 0); // LED1消灯
delete x;
}
コメント